
Współczesne osiągnięcia w dziedzinie nauki i techniki pozwalają mieć uzasadnioną nadzieję, że wypadków drogowych można uniknąć, a w razie ich powstania skutki i straty materialne wywołane wypadkami mogą być znacznie zmniejszone. Ten wniosek opiera się na matematycznej teorii niezawodności, umożliwiającej skonstruowanie z poszczególnych zawodnych elementów układu o określonej niezawodności działania. To stwierdzenie można całkowicie zastosować do układu samochód — kierowca — droga. Sformułowanie „niezawodny układ złożony z zawodnych elementów” jest uogólnieniem mającym zastosowanie do każdego poziomu techniki, przyrody i społeczeństw a poczynając od wnętrza atomu, a na kosmosie kończąc.
Praktycznymi formami realizacji tego ustalenia są: metoda sprawdzeń (kontroli), metoda zamiany oraz metoda rezerwacji.
Metoda rezerwacji jest: najbardziej perspektywiczna, dla takich układów systemu jakim jest samochód. Podstawowa tendencja rezerwacji polega na ułatwieniu pracy kierowcy przez zastosowanie urządzeń automatyki (poziom biorobota).
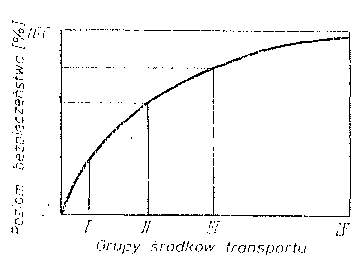
Wykorzystując metodę rezerwacji określono możliwość opracowania idealnie bezpiecznego samochodu. Na wykresie współrzędnych na osi odciętych odłożono grupy środków transportu, a na osi rzędnych — poziom bezpieczeństwa odpowiadający tym grupom.
 Przestanki stworzenia idealnie bezpiecznego samochodu
Przestanki stworzenia idealnie bezpiecznego samochodu
I — grupa niekierowanych środków transportu,
II — grupa kierowanych środków transportu, wykorzystujących urządzenia mechaniczne (protezy) polepszające i ułatwiające proces kierowania,
III — grupa półautomatycznych środków transportu stanowiących symbiozę człowieka i samochodu (bioroboty),
IV — grupa całkowicie zautomatyzowanych środków transportu, w których kierowanie samochodem odbywa się bez udziału człowieka (automaty).
Reasumując, przesłanki do stworzenia idealnie bezpiecznego samochodu mogą być spełnione tylko wtedy, gdy automaty przejmą najpierw na siebie wszystkie proste operacje kierowania samochodem, takie jak utrzymywanie założonego kierunku jazdy i bezpiecznej odległości między samochodami, i gdy zautomatyzowane systemy sterowania ruchom przejmą zadania wyboru optymalnej trasy z punktu widzenia bezpieczeństwa i ekonomii (poziom biorobota). a dopiero następnie można będzie uwolnić kierowcę od obowiązku kierowania samochodem (poziom automatu).